LMS through the H-infinity lens¶
Tutorial goal
Reproduce the qualitative message of Hassibi–Sayed–Kailath: LMS is not only crude least-squares descent; it also has a worst-case energy-gain interpretation.
Note
New to the terminology? See the lattice DSP concept map and the causality/data-use guide for how online, offline, block, and MIMO examples should be read.
Context¶
This flagship tutorial explains a historical surprise in adaptive filtering. The LMS idea goes back to Widrow and Hoff’s 1960 adaptive switching work. For more than three decades, it was often introduced as the inexpensive stochastic-gradient approximation to least squares, while RLS was the exact least-squares recursion. Hassibi, Sayed, and Kailath then showed that LMS also has a deterministic robust-filtering interpretation: with the right viewpoint, the algorithm is tied to an H-infinity minimax energy-gain problem rather than only to an average squared-error objective.
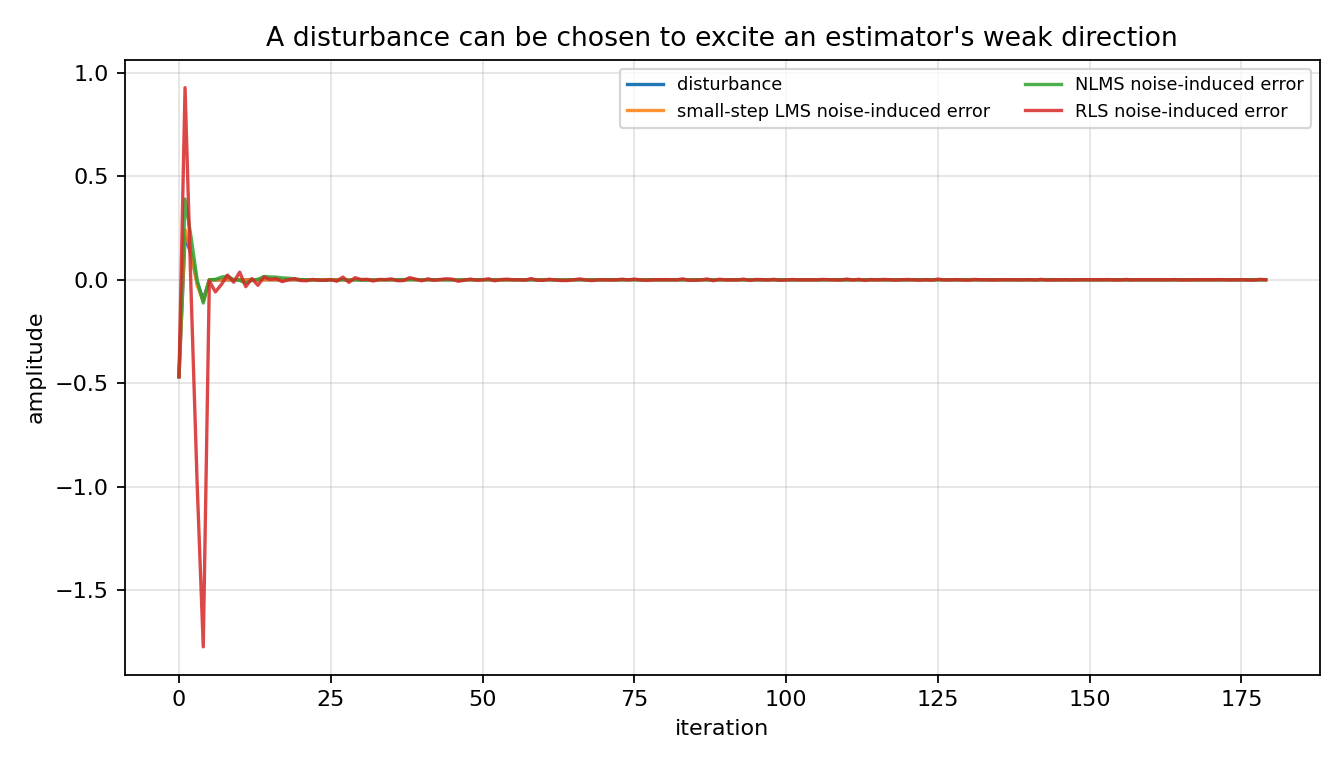
That historical angle is useful because it changes the way readers interpret a familiar algorithm. The script below does not try to reprint every derivation from the 1996 paper. Instead it builds a finite-horizon diagnostic that readers can inspect: for fixed regressors, the map from additive disturbance to prediction error is a linear operator. Its largest singular value exposes the disturbance direction that causes the largest error-energy amplification.
Key idea and equations¶
The adaptive filtering model is
where u_i is the regressor, w_* is the unknown vector, and v_i is a disturbance.
Least-squares thinking focuses on sums such as
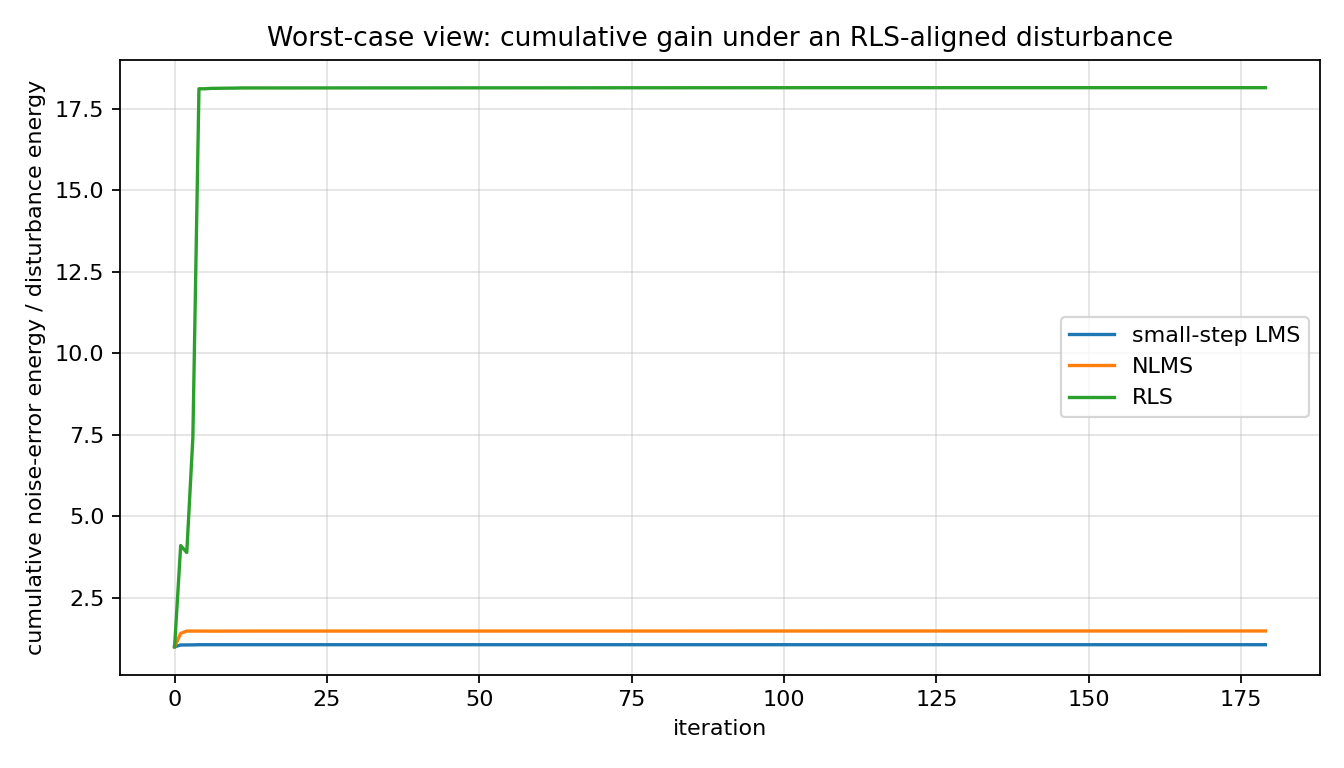
The robust H-infinity diagnostic instead asks for a worst-case energy gain. In this tutorial we estimate, for each algorithm,
by forming the finite-horizon sensitivity matrix from disturbance samples to noise-induced prediction errors.
How to read the result¶
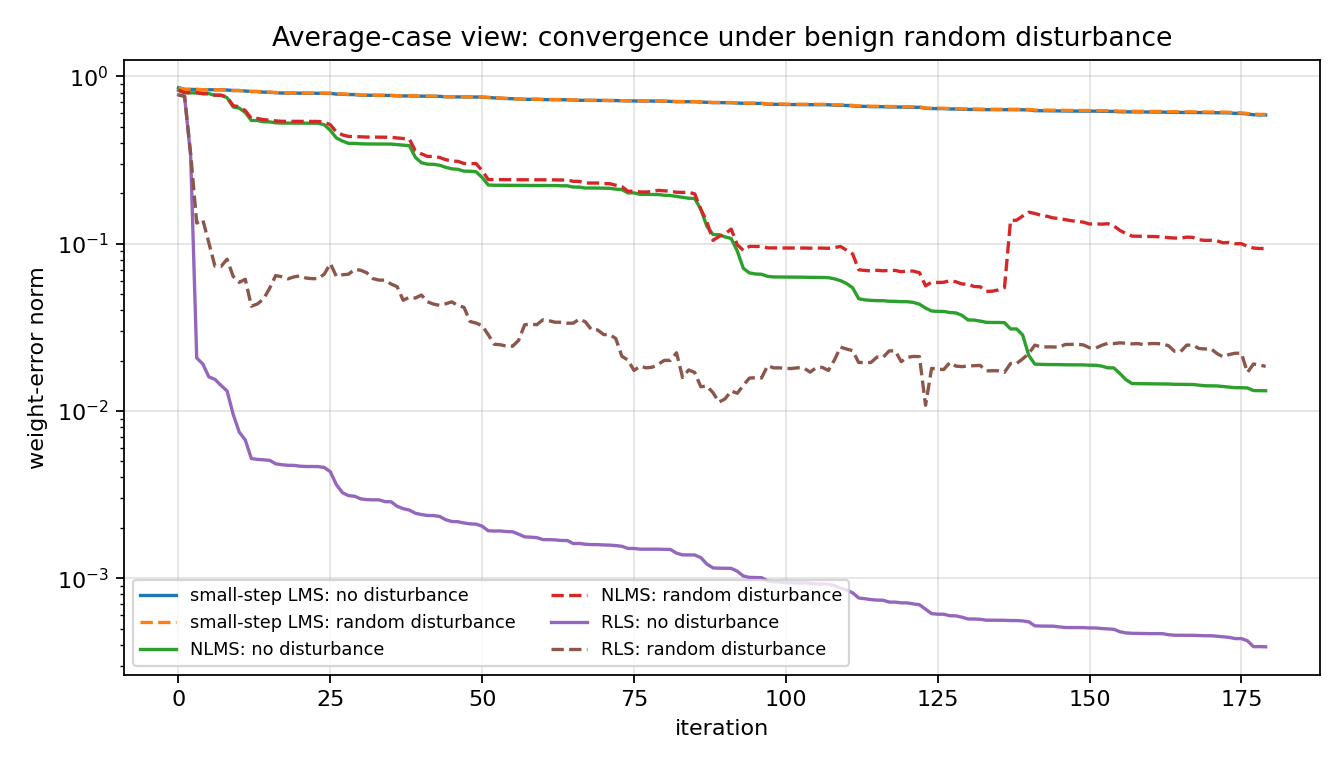
Read the first plot in the classical least-squares way: RLS converges fastest under benign random noise. Then read the gain plots in the minimax way: the same estimator can have a larger worst-case disturbance direction. That change of viewpoint is the lesson.
Run command¶
python examples/hinf_lms_reproduction.py
Run status¶
Return code: 0
Captured stdout¶
H-infinity-inspired LMS/RLS diagnostic
samples=180, order=4, noise_rms=0.04
algorithm worst gain random gain RLS-worst gain random tail MSE
----------------------------------------------------------------------------------
small-step LMS 2.568 1.052 1.064 3.016e-02
NLMS 15.040 1.539 1.486 3.900e-03
RLS 18.152 1.219 18.152 1.498e-03
Interpretation:
RLS usually converges fastest under benign random noise, but the sensitivity
matrix exposes directions where disturbance energy is amplified more strongly.
Small-step LMS is slower, yet its disturbance-to-error gain can be smaller.
This illustrates the Hassibi-Sayed-Kailath message: LMS can be understood
through a worst-case energy-gain lens, not only as crude least-squares descent.
Figures¶
hinf_lms_cumulative_gain.png¶
hinf_lms_random_convergence.png¶
hinf_lms_worst_case_disturbance.png¶
Generated data files¶
Source code¶
1from __future__ import annotations
2
3import csv
4import os
5from dataclasses import dataclass
6from pathlib import Path
7
8import matplotlib.pyplot as plt
9import numpy as np
10
11
12@dataclass(frozen=True)
13class Algorithm:
14 name: str
15 kind: str
16 mu: float = 0.0
17 lam: float = 0.995
18 p0: float = 100.0
19 eps: float = 1e-6
20
21
22def artifact_dir() -> Path:
23 path = Path(os.environ.get("LATTICE_DSP_ARTIFACT_DIR", "reports/example-artifacts"))
24 path.mkdir(parents=True, exist_ok=True)
25 return path
26
27
28def make_regressors(n: int = 180, order: int = 4, seed: int = 12) -> np.ndarray:
29 rng = np.random.default_rng(seed)
30 x = rng.normal(size=n + order + 2)
31 for i in range(1, len(x)):
32 x[i] = 0.92 * x[i - 1] + 0.45 * x[i]
33 u = np.zeros((n, order), dtype=float)
34 for i in range(n):
35 u[i] = x[i + order - 1 : i - 1 : -1] if i > 0 else x[order - 1 :: -1]
36 return u / np.sqrt(np.mean(u * u))
37
38
39def run_adaptive(
40 u: np.ndarray, w_true: np.ndarray, disturbance: np.ndarray, alg: Algorithm
41) -> dict[str, np.ndarray]:
42 n, p = u.shape
43 w = np.zeros(p, dtype=float)
44 P = alg.p0 * np.eye(p)
45
46 pred_error = np.zeros(n)
47 posterior_error = np.zeros(n)
48 weight_error = np.zeros(n)
49 weights = np.zeros((n, p))
50
51 for i, ui in enumerate(u):
52 d = float(ui @ w_true + disturbance[i])
53 e = d - float(ui @ w)
54 pred_error[i] = e
55
56 if alg.kind == "lms":
57 w = w + alg.mu * ui * e
58 elif alg.kind == "nlms":
59 w = w + (alg.mu / (alg.eps + float(ui @ ui))) * ui * e
60 elif alg.kind == "rls":
61 Pu = P @ ui
62 gain = Pu / (alg.lam + float(ui @ Pu))
63 w = w + gain * e
64 P = (P - np.outer(gain, ui) @ P) / alg.lam
65 P = 0.5 * (P + P.T)
66 else:
67 raise ValueError(f"Unknown algorithm kind: {alg.kind}")
68
69 posterior_error[i] = d - float(ui @ w)
70 weight_error[i] = np.linalg.norm(w - w_true)
71 weights[i] = w
72
73 return {
74 "prediction_error": pred_error,
75 "posterior_error": posterior_error,
76 "weight_error": weight_error,
77 "weights": weights,
78 }
79
80
81def sensitivity_matrix(
82 u: np.ndarray, w_true: np.ndarray, alg: Algorithm, *, output: str
83) -> tuple[np.ndarray, float, np.ndarray]:
84 n = u.shape[0]
85 zero = np.zeros(n)
86 base = run_adaptive(u, w_true, zero, alg)[output]
87 M = np.zeros((n, n), dtype=float)
88 for j in range(n):
89 impulse = np.zeros(n)
90 impulse[j] = 1.0
91 response = run_adaptive(u, w_true, impulse, alg)[output]
92 M[:, j] = response - base
93 U, S, Vt = np.linalg.svd(M, full_matrices=False)
94 return M, float(S[0] ** 2), Vt[0]
95
96
97def cumulative_gain(noise_error: np.ndarray, disturbance: np.ndarray) -> np.ndarray:
98 num = np.cumsum(noise_error * noise_error)
99 den = np.cumsum(disturbance * disturbance) + 1e-30
100 return num / den
101
102
103def main() -> None:
104 out_dir = artifact_dir()
105 rng = np.random.default_rng(4)
106
107 n = 180
108 order = 4
109 u = make_regressors(n=n, order=order)
110 w_true = np.array([0.70, -0.42, 0.25, -0.12])
111 noise_rms = 0.04
112
113 algorithms = [
114 Algorithm("small-step LMS", "lms", mu=0.020),
115 Algorithm("NLMS", "nlms", mu=0.25),
116 Algorithm("RLS", "rls", lam=0.995, p0=100.0),
117 ]
118
119 random_disturbance = noise_rms * rng.normal(size=n)
120
121 sensitivity: dict[str, dict[str, object]] = {}
122 for alg in algorithms:
123 M, gain, v_unit = sensitivity_matrix(u, w_true, alg, output="prediction_error")
124 sensitivity[alg.name] = {"matrix": M, "gain": gain, "v_unit": v_unit}
125
126 # Worst-case disturbance for the RLS prediction-error map. Scale it to the same
127 # energy as a length-n Gaussian sequence with RMS = noise_rms.
128 rls_worst_unit = np.asarray(sensitivity["RLS"]["v_unit"], dtype=float)
129 rls_worst_disturbance = noise_rms * np.sqrt(n) * rls_worst_unit
130
131 zero = np.zeros(n)
132 rows = []
133 trajectories: dict[str, dict[str, dict[str, np.ndarray]]] = {}
134
135 for alg in algorithms:
136 clean = run_adaptive(u, w_true, zero, alg)
137 random_run = run_adaptive(u, w_true, random_disturbance, alg)
138 worst_run = run_adaptive(u, w_true, rls_worst_disturbance, alg)
139
140 random_noise_error = random_run["prediction_error"] - clean["prediction_error"]
141 worst_noise_error = worst_run["prediction_error"] - clean["prediction_error"]
142
143 rows.append(
144 {
145 "algorithm": alg.name,
146 "mu_or_lambda": alg.mu if alg.kind != "rls" else alg.lam,
147 "operator_worst_case_gain": float(sensitivity[alg.name]["gain"]),
148 "random_noise_gain": float(
149 np.sum(random_noise_error**2) / (np.sum(random_disturbance**2) + 1e-30)
150 ),
151 "rls_worst_disturbance_gain": float(
152 np.sum(worst_noise_error**2) / (np.sum(rls_worst_disturbance**2) + 1e-30)
153 ),
154 "clean_final_weight_error": float(clean["weight_error"][-1]),
155 "random_final_weight_error": float(random_run["weight_error"][-1]),
156 "rls_worst_final_weight_error": float(worst_run["weight_error"][-1]),
157 "random_tail_mse": float(np.mean(random_run["prediction_error"][-50:] ** 2)),
158 "rls_worst_tail_mse": float(np.mean(worst_run["prediction_error"][-50:] ** 2)),
159 }
160 )
161 trajectories[alg.name] = {"clean": clean, "random": random_run, "rls_worst": worst_run}
162
163 csv_path = out_dir / "hinf_lms_summary.csv"
164 with csv_path.open("w", newline="", encoding="utf-8") as f:
165 writer = csv.DictWriter(f, fieldnames=list(rows[0].keys()))
166 writer.writeheader()
167 writer.writerows(rows)
168
169 t = np.arange(n)
170
171 fig, ax = plt.subplots(figsize=(8.4, 4.8))
172 for alg in algorithms:
173 ax.semilogy(
174 t, trajectories[alg.name]["clean"]["weight_error"], label=f"{alg.name}: no disturbance"
175 )
176 ax.semilogy(
177 t,
178 trajectories[alg.name]["random"]["weight_error"],
179 linestyle="--",
180 label=f"{alg.name}: random disturbance",
181 )
182 ax.set_title("Average-case view: convergence under benign random disturbance")
183 ax.set_xlabel("iteration")
184 ax.set_ylabel("weight-error norm")
185 ax.grid(True, alpha=0.35)
186 ax.legend(ncol=2, fontsize=8)
187 fig.tight_layout()
188 convergence_path = out_dir / "hinf_lms_random_convergence.png"
189 fig.savefig(convergence_path, dpi=160)
190 plt.close(fig)
191
192 fig, ax = plt.subplots(figsize=(8.4, 4.8))
193 for alg in algorithms:
194 clean = trajectories[alg.name]["clean"]
195 worst = trajectories[alg.name]["rls_worst"]
196 noise_error = worst["prediction_error"] - clean["prediction_error"]
197 ax.plot(t, cumulative_gain(noise_error, rls_worst_disturbance), label=alg.name)
198 ax.set_title("Worst-case view: cumulative gain under an RLS-aligned disturbance")
199 ax.set_xlabel("iteration")
200 ax.set_ylabel("cumulative noise-error energy / disturbance energy")
201 ax.grid(True, alpha=0.35)
202 ax.legend()
203 fig.tight_layout()
204 gain_path = out_dir / "hinf_lms_cumulative_gain.png"
205 fig.savefig(gain_path, dpi=160)
206 plt.close(fig)
207
208 fig, ax = plt.subplots(figsize=(8.4, 4.8))
209 ax.plot(t, rls_worst_disturbance, label="disturbance")
210 for alg in algorithms:
211 clean = trajectories[alg.name]["clean"]
212 worst = trajectories[alg.name]["rls_worst"]
213 noise_error = worst["prediction_error"] - clean["prediction_error"]
214 ax.plot(t, noise_error, label=f"{alg.name} noise-induced error", alpha=0.85)
215 ax.set_title("A disturbance can be chosen to excite an estimator's weak direction")
216 ax.set_xlabel("iteration")
217 ax.set_ylabel("amplitude")
218 ax.grid(True, alpha=0.35)
219 ax.legend(fontsize=8, ncol=2)
220 fig.tight_layout()
221 disturbance_path = out_dir / "hinf_lms_worst_case_disturbance.png"
222 fig.savefig(disturbance_path, dpi=160)
223 plt.close(fig)
224
225 print("H-infinity-inspired LMS/RLS diagnostic")
226 print(f"samples={n}, order={order}, noise_rms={noise_rms}")
227 print()
228 print(
229 f"{'algorithm':18s} {'worst gain':>12s} {'random gain':>12s} {'RLS-worst gain':>15s} {'random tail MSE':>16s}"
230 )
231 print("-" * 82)
232 for row in rows:
233 print(
234 f"{row['algorithm']:18s} "
235 f"{row['operator_worst_case_gain']:12.3f} "
236 f"{row['random_noise_gain']:12.3f} "
237 f"{row['rls_worst_disturbance_gain']:15.3f} "
238 f"{row['random_tail_mse']:16.3e}"
239 )
240 print()
241 print("Interpretation:")
242 print(" RLS usually converges fastest under benign random noise, but the sensitivity")
243 print(" matrix exposes directions where disturbance energy is amplified more strongly.")
244 print(" Small-step LMS is slower, yet its disturbance-to-error gain can be smaller.")
245 print(" This illustrates the Hassibi-Sayed-Kailath message: LMS can be understood")
246 print(" through a worst-case energy-gain lens, not only as crude least-squares descent.")
247 print()
248 print(f"Wrote {convergence_path}")
249 print(f"Wrote {gain_path}")
250 print(f"Wrote {disturbance_path}")
251 print(f"Wrote {csv_path}")
252
253
254if __name__ == "__main__":
255 main()